
沈陽瑞思達軸承有限公司-回轉(zhuǎn)支承事業(yè)部
16年行業(yè)經(jīng)驗開發(fā)強·OEM/MRO——誠實守信 用戶至上
技術(shù)咨詢:
024-22923833 024-24853899
024-22923833 024-24853899


 |
 |
機器人用回轉(zhuǎn)支承分類
現(xiàn)代工業(yè)機器人常見的回轉(zhuǎn)支承裝置結(jié)構(gòu)大致有以下三種:分體式回轉(zhuǎn)支承結(jié)構(gòu)、一體式回轉(zhuǎn)支承結(jié)構(gòu) 在結(jié)構(gòu)上主要采用交叉滾子回轉(zhuǎn)支承來承受工業(yè)機器人的傾覆力矩 它在結(jié)構(gòu)上采用具有足夠承載能力的主軸承減速機 它結(jié)構(gòu)特點是 傳真:024-88729249 郵箱:sales@totalslewing.com 地址:沈陽市沈河區(qū)沈陽路11號 盛京公寓506 郵編:110014 024-22923833 024-24853899 微信掃一掃 、混合型回轉(zhuǎn)支承結(jié)構(gòu)。
分體式回轉(zhuǎn)支承結(jié)構(gòu):
、軸向力 、徑向力,包括動態(tài)與靜態(tài)工況 ,傳動減速機只承受回轉(zhuǎn)軸的旋轉(zhuǎn)扭矩 ,所以,此種工況下要求交叉滾子回轉(zhuǎn)支承軸承的精度較高,并以此來保證機器人的回轉(zhuǎn)精度。
一體式回轉(zhuǎn)支承結(jié)構(gòu):
,由減速機的主軸承承受工業(yè)機器人的全部傾覆力矩和軸向力,這樣話就不需要交叉滾子回轉(zhuǎn)支承軸承,通過減速機的主軸承提供較高精度,但這種減速機的造價較為昂貴。
混合型回轉(zhuǎn)支承結(jié)構(gòu):
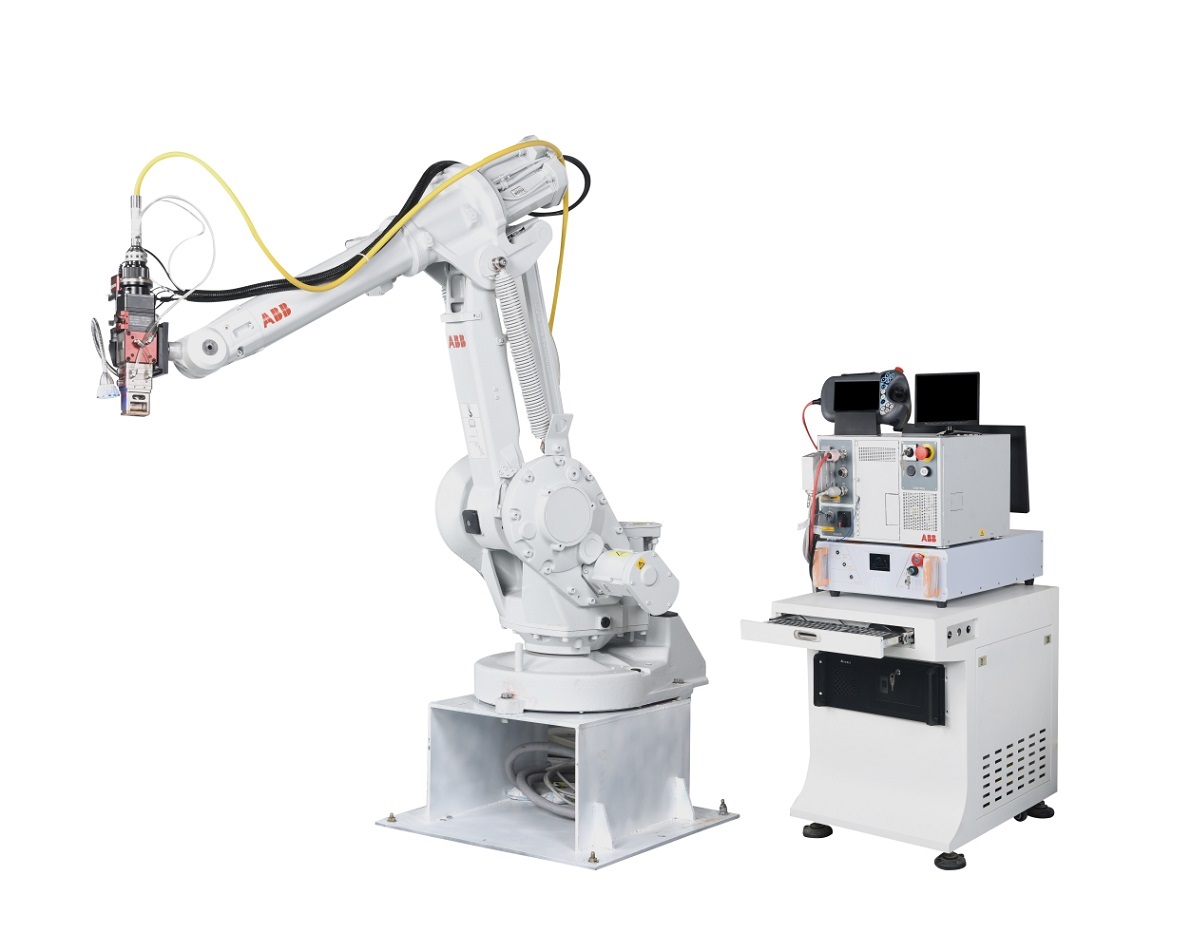
,同時采用有一定承載能力的中空主軸承減速器和具有一定精度的交叉滾子軸承來共同完成支承和回轉(zhuǎn)的功能。工業(yè)機器人的轉(zhuǎn)臺同時與回轉(zhuǎn)傳動減速機的輸出軸面板以及交叉滾子軸承的內(nèi)圈固定連接,交叉滾子回轉(zhuǎn)支承軸承的剛度遠遠大于減速器輸出面板的彎曲剛度,所以在動態(tài)工況下,彎曲力矩和軸向力矩主要由交叉滾子回轉(zhuǎn)支承軸承來承載。這樣,靜態(tài)時的軸承精度由減速器的主軸承來保證,因而交叉滾子軸承的精度就不需要像種分體式結(jié)構(gòu)那樣高的精度。由于價格實惠此種混合式結(jié)構(gòu)有可能得到較高的性價比。被廣泛應用于那些高速度、高精度、重負載的上下料搬運機器人、裝配機器人、碼垛機器人等。
服務熱線
了解更多詳情Copyright ? 2020-2021 All Rights Reserved. 沈陽瑞思達軸承有限公司-回轉(zhuǎn)支承事業(yè)部 版權(quán)所有 遼ICP備11007128號
沈陽網(wǎng)站建設丨啟達傳媒
 挖掘機用回轉(zhuǎn)支承
挖掘機用回轉(zhuǎn)支承